

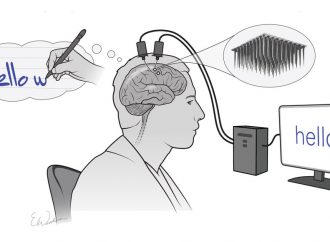
Researchers at Shanghai University have developed a new method to achieve type synthesis of non-holonomic underactuated parallel mechanisms. Their method, presented in a paper published in Acta Astronautica, could aid the development of space robots for on-orbit servicing operations.
Every year, approximately 100 satellites are launched into space to monitor activity on Earth and enable services such as communications or GPS systems. The term “on-orbit servicing” refers to a variety of operations aimed at maintaining space systems in orbit, which can entail repairs, assembly, refueling and upgrading spacecraft after their deployment.
In future, space robots could help to complete on-orbit servicing missions quickly and effectively, without the need for human assistance. Non-holonomic parallel robotics is a particularly promising approach in space robotics, based on specific mechanical and physical principles.
In physics and mathematics, a non-holonomic system is a system whose state depends on the path taken to achieve it. In robotics, non-holonomic systems have gained particular relevance in the context of motion planning and feedback linearization for mobile robots.
“The underactuated non-holonomic parallel mechanism is a new direction of parallel space robotics, with small volume, light weight, low cost, low energy consumption, and high flexibility,” the researchers wrote in their paper.
One key issue in the development of parallel mechanisms is type synthesis, which involves finding all possible types of parallel mechanisms generating a motion of the moving platform with a specified degree of freedom (DOF) or motion pattern. Systematic approaches to the type synthesis of parallel mechanisms can be classified in two main groups: approaches with a specified number of DOF and those with a specified motion pattern.
“The existing methods on type synthesis could not generate underactuated non-holonomic parallel mechanisms with the introduction of the non-holonomic spherical pairs in parallel mechanisms,” the researchers explained. “This paper is devoted to type synthesis of underactuated parallel mechanisms with spherical motion pattern accompanied by the generation of the non-holonomic spherical pairs in parallel mechanisms with spherical motion pattern.”
In their study, the researchers proposed a new roller-sphere contact method, as well as a generation method of non-holonomic spherical pairs in parallel underactuated mechanisms with spherical motion pattern. The non-holonomic spherical constraint mechanism they developed simplifies the spatial structure and improves the accuracy of the spherical non-holonomic constraint structure.
The researchers demonstrated how their method could be applied in real-life scenarios, using the example of a non-holonomic underactuated joint mechanism of a space robot for on-orbit servicing operations. In future, this technique could be used to develop lightweight, flexible and cheaper space robots with lower energy consumption.
Source: Tech Explore






















Leave a Comment
You must be logged in to post a comment.